Phase 2: Rome wasn’t built in a day

Dear all,
We are closing all the necessary steps to present a renewed and Upgraded FABtotum Personal Fabricator. We are ready for it! Constantly improving, expanding (and yes, fixing) what is still the first and only commercially available multipurpose Personal Fabricator ever.
This endeavour has been the toughest, and as pioneers we have to learn by doing.
The FABtotum is getting upgrade, you knew it already.
We did this because you asked it, we did this because it was due.
The upgraded FABtotum Personal Fabricator, it’s a direct consequence of the community feedback, as stated in our “FABtotum is getting upgraded” post and Development document thread.
This post is to share with you the changes that are being introduced.
All the units shipped from now on will feature all the changes outlined here.
Lets get started!
Note: All the pictures you will see in this post are created with the newer components.

FABtotum Personal Fabricator:
The FABtotum itself has been reworked and a lot of small things have been changed to make it easier to service and assemble.
Changes on the platform:
- Simplified Feeder Mechanism (no need to engage or disengage, no buttons on the back panel)
- New Bowden tube. Better feeding and solved the “tube getting caught” issue.
- Added the Flex Cable protection shield
- Front door lock force increased & new safety switch
- New Heated bed and connection plate (“V2 bed”)
Backward compatibility:
Just to reiterate, all the new modules and upgrades are retrocompatible with older units.
We recently introduced versioning inside the software and the firmware in order to allow users to upgrade and set the FABtotum accordingly.
Even custom configurations (AKA mods) are allowed and custom config files can be loaded in the FAB UI.
For all the Fixes we’ll be providing DIY alternative tutorials as soon as possible.
Replacements and assistance for existing Hybrid Heads & Hybrid build plates will be granted and we’ll be upgrading defective parts to the latest iteration at no cost, upon retrieval and inspection of the part (refer to our Warranty policy).
Printing Head V2.

The Standard duty printing head will be the Print Head V2 (while officially this is the first “print only”, it includes all the knowledge from V1.)
- Totally serviceable with heating cartridge.
- Print PLA, ABS, NYLON, HIPS, PC and PETG.
- Additional cooling fan
- will reach higher temperatures (250°-260°) in continuos operation with fan always on.
- full metal body, can survive cartridge overheats.
- inox steel melting chamber, with heatbreak to stop thermal flow to the head. This, again, will get you a more resistant head, which will endure longer and will stay clean and safe from damages.
- Aluminium heat sink to cooldown the body and PTFE liner.
- Brass nozzles will be interchangeables. standard nozzle: 0.4mm.
- Due to the geoometry of the heating chamber, overhangs and bridges are less of a problem now: Less friction allow better retracts wich means better flux control and better prints.
Milling Head V2
The new milling head is lighter and has optional vacuum support attachment that you can replicate with the FABtotum as well.
The new shaft has been balanced and less noise is now produced (sensibly less, you can actually speak fine in proximity of the FABtotum milling).
Splitting the motor from the printing side makes both easier to keep clean and safe from damages. Hot temperatures won’t get you any trouble.
the milling head V2 can be paired with a vacuum clip (taht you can print as well) to suck dust away.
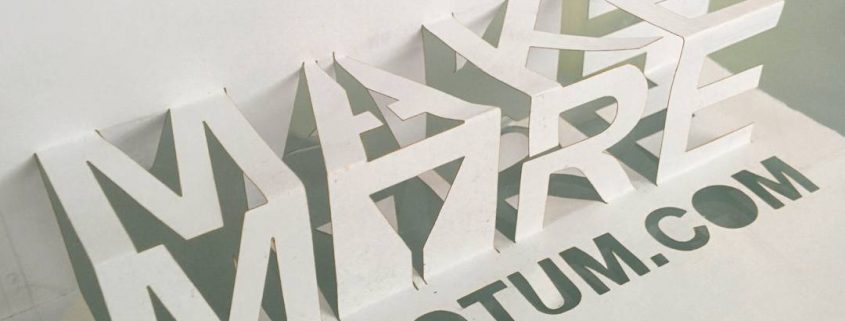
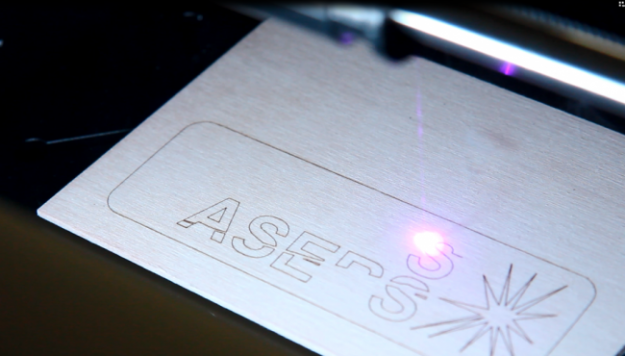
Laser Head V1
We’ve been working on our Laser Head for a while now.
I’ts a little cool 500mW (or possibly 1mW by the end of development) module.
There might be many uses in labs, PCB engraving and so on.
We’re looking at possible suggestions, so feel free to tell us what you would do with it.
In short, more than engraving we are looking at possible applications, we are running out of parent pictures and 80’s icons, you know.
Some examples made with cura. other plotting methods are available.

Hybrid Plate V2
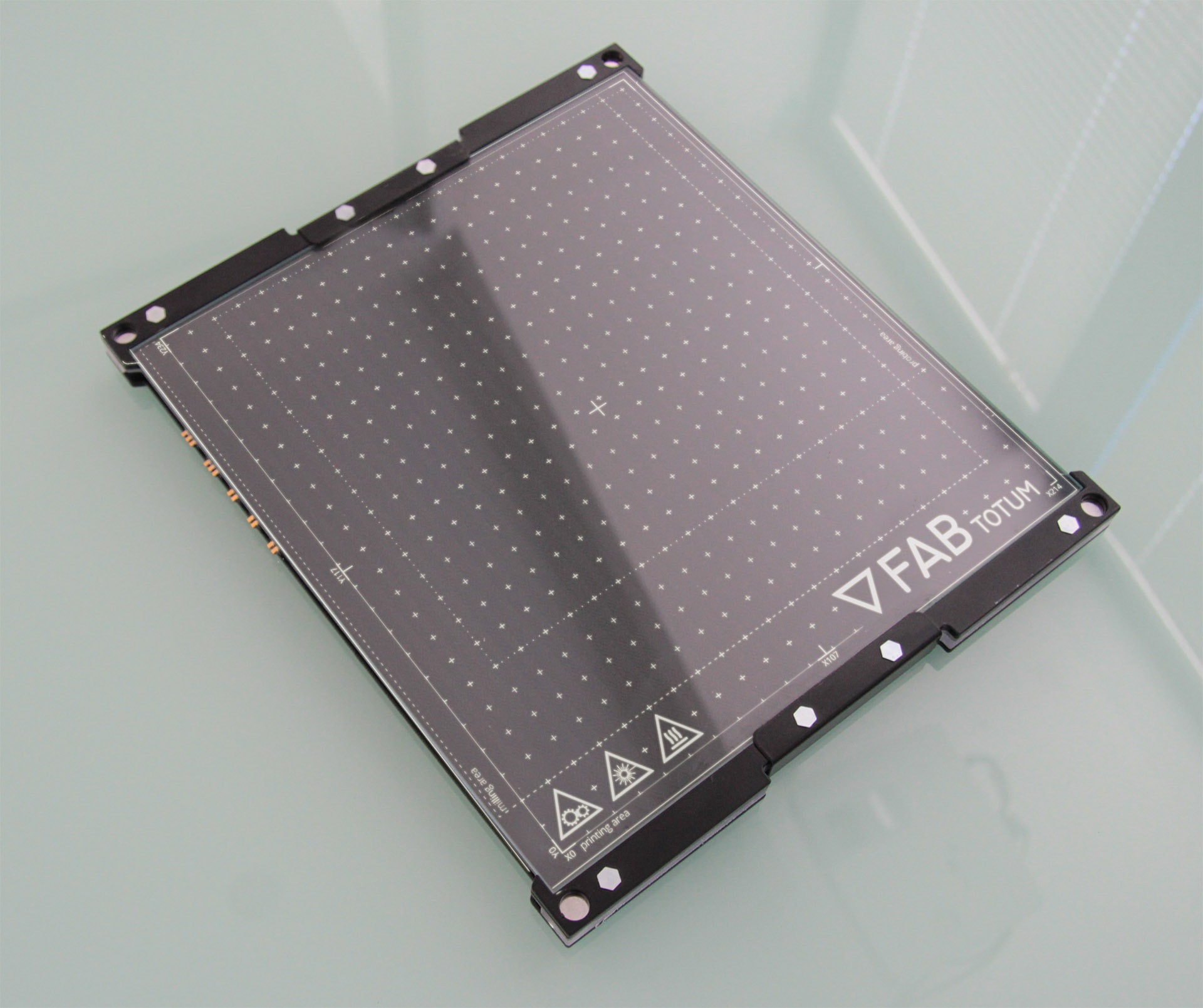
The Heated bed (as much as Hybrid head’s) design hasn’t changed much…apparently.
The design of the PCB has however moved to a more resilient solution that requires less “playing around” with the bed to get a stable electrical connection.
Heating is also much faster now, with around 1 minute less in heating time (around 1 minute to hit 50-60°C, good for PLA. You previously needed around 2 minutes with V1)
We added a new overlay for a better positioning of the parts. It’s a great help to know exactly where the print area is and where the milling area and the scanning area are.
The overlay grid in centimeters is a great help for quick measurements as well.
The Milling side hasn’t been changed as it has been proved effective.
The Hybrid Head is no more.
This has been a tough decision, but we are announcing the official death of the Hybrid Head.
The performances of the Print Head and the Milling Head are, compared to the Hybrid Head V1 and V2, on another level.
By separating the two functionalities we will be also able to provide tailored solutions where you can decide what head to purchase with the platform: new customers that are not into milling will be able to scrap an useless expense; people that do not fancy FDM 3D printing will be choosing milling and so on.
This concept will be further expanded with the introduction of the Laser Head and the PRISM platform…and what’s coming next!
This modular approach was always in the DNA of the FABtotum Personal Fabricator and will be pursued for the years to come. This is one of the keystones of this “PHASE 2”.
Providing a solid, high quality Printing Head and making it easy to service was the next logical step.
We’ll probably get some complaints for this unilateral decision, but we think this is for the best. As many suggested, there are technical and practical reasons to steer away from the Hybrid Head (which, by the way, was a great accomplishment technology-wise).
IMPORTANT! All existing Hybrid Head orders will be converted to Dedicated Print Heads and given either a free hi-quality spool or a partial or full refund for the order. The Hybrid Head is now officially discontinued. If you are in line for one of those you’ll receive an email notice in the next few days. All (and only) existing FABtotum orders will receive both a Printing Head and a Milling Head with no additional cost.
Switching to this new idea of a more personalized FABtotum will have its effects though: new parts are expected to be delivered us within November, which is slightly after our first estimate. We know these are bad news, but we’d rather delay than rush.
Keep an eye on further updates to make sure you are always aware of what we’re doing. We will of course alert all queued orders about the shipping times (of both heads and FABtotum).
We’re heading to Rome!
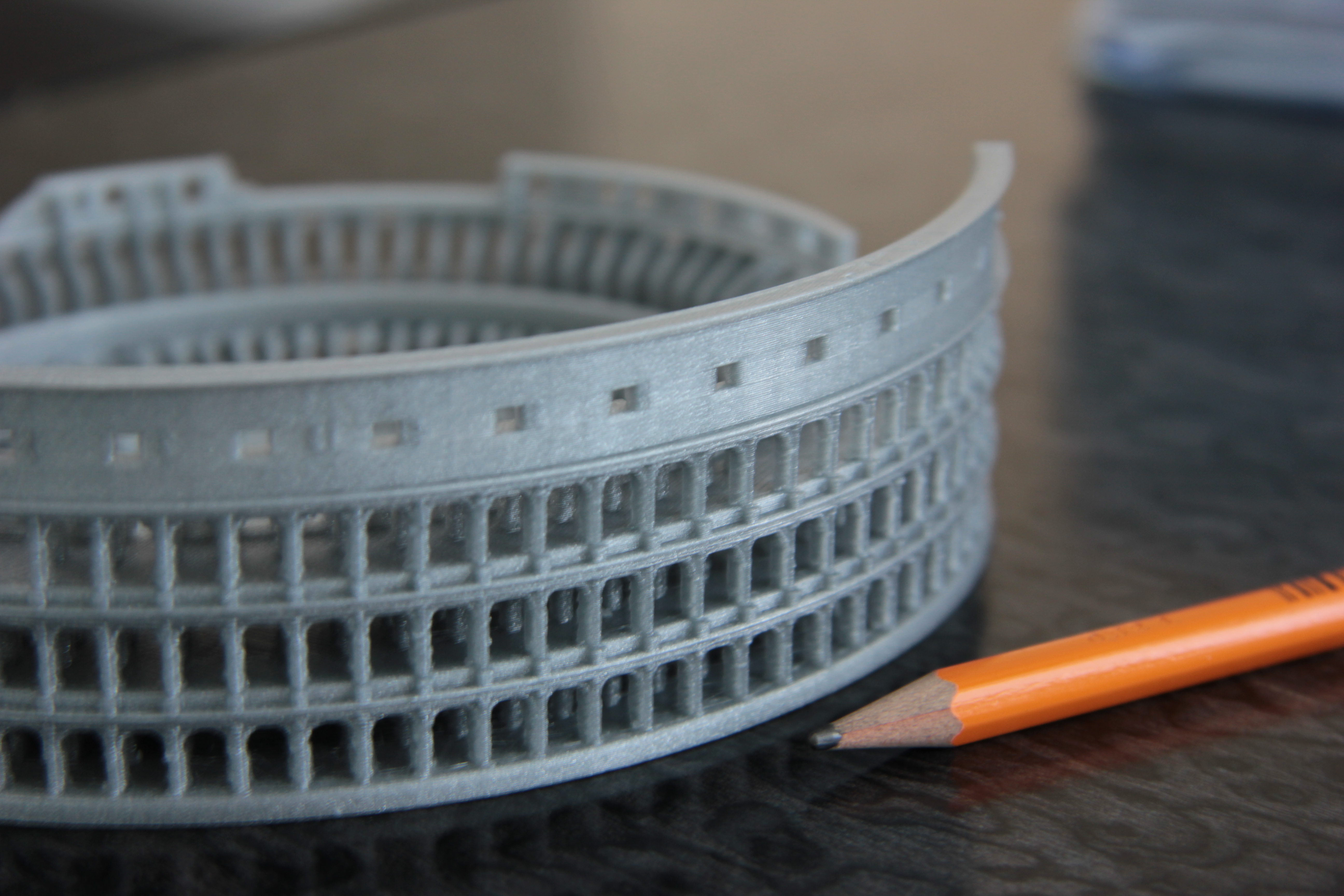
“Rome wasn’t built in a day”: this turned out to be true for us as well. A year later we are back to our capital with an improved version of the product: we will be there to show you the progress made so far. We still have tons of things to do and to develop but as the ancients said: “All roads leads to Rome” so here we go!
If you get the chance to come, don’t miss our stand: as soon as we get to know our exact location in the faire we will inform you.
New filaments available

Following the high requests, we are glad to introduce our own line of filaments. These comes in convenient 750g spools that fits nicely in the FABtotum spool compartment. They are tested on our FABtotum of course, and are Made in Italy.
More colors and materials will be available in the future; right now you can already enjoy a color selection that ranges from “sun yellow” to “silver”.
Discover all the filaments here
New Support System in the works.
Assistance and Customer Care has been one of our weakness, we know it. Along with increasing our staff and have more people to assist you with any request (you are a growing community, we need to expand as well!), we are working on a different Ticket System which will get to a better assistance experience for both you and us. Also, we are about to add a range of FAQs which will be constantly updated in order to give you a first (and ready) answer. Our Wiki is always open to any review (we are thankful to all the users who help us!) so this is getting better as well. Along with all these updates to the FABtotum, we will rewrite the manual as well. This will be available online of course and we will update it when needed.
New Ticket System will be available for FABtotum owners only: a Product Code will be needed to access the system and get in touch with Support Team.
Tickets will only take care of Technical troubles while any other inquire will be addressed to an online form which will alert us via email and authomatically redirect it to the right person according to the selected subject.
Every customer will be followed by a single troubleshooting procedure from start to finish. We also streamlined replacement procedures. Communication between you and the Support Team will be easier, with a clear chronology.

What’s next?
So far so good then, but we are not stopping yet. We are of course developing PRISM as well, and we wll update you all with a dedicated post as soon as possible.
Hoping to meet your expectations, we’ll be back soon with all the news we have!
Stay tuned
the FABteam








 Setup Wizard
Setup Wizard As all computer-controlled devices, the FABtotum rely on electronics to perform all the operations needed, both from a computational and physical point of view (calculate what to do and correctly move motors accordingly).
As all computer-controlled devices, the FABtotum rely on electronics to perform all the operations needed, both from a computational and physical point of view (calculate what to do and correctly move motors accordingly). The first Z-Axis test assembly was a success.
The first Z-Axis test assembly was a success.